|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
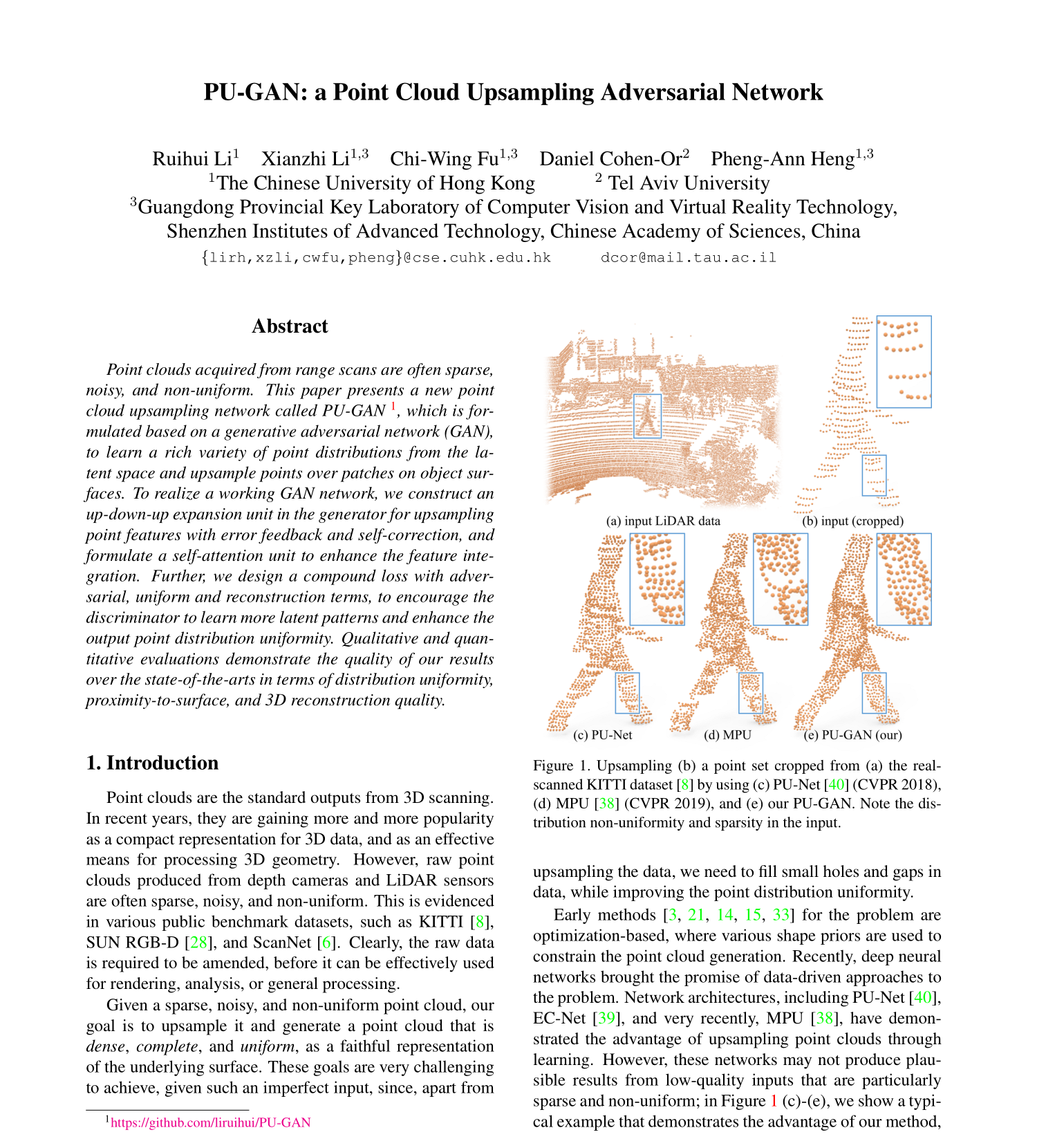 |
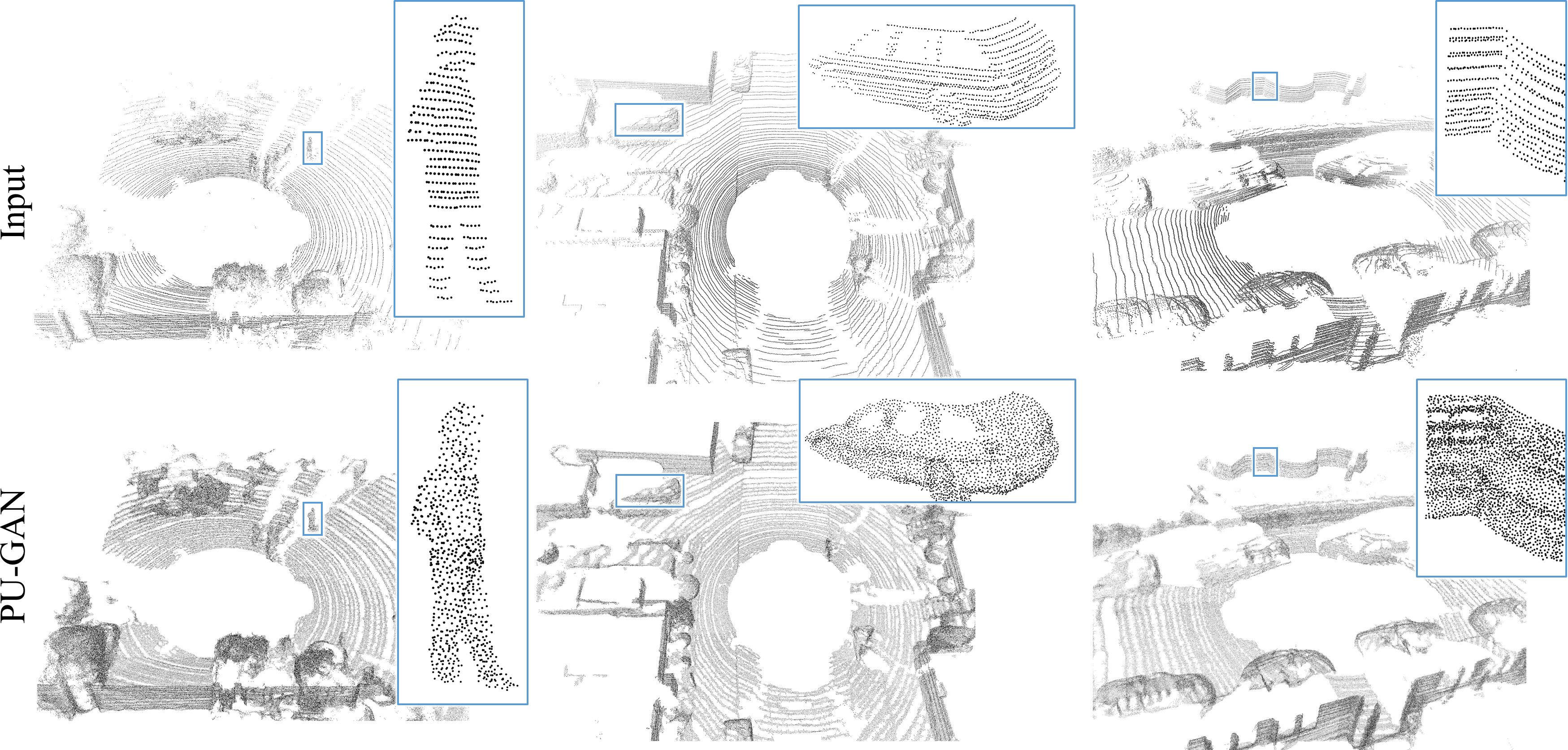
Ruihui Li, Xianzhi Li, Chi-Wing Fu, Daniel Cohen-Or, Pheng-Ann Heng. PU-GAN: a Point Cloud Upsampling Adversarial Network. In ICCV, 2019. [arxiv] [paper] [supp] |
|
|
|
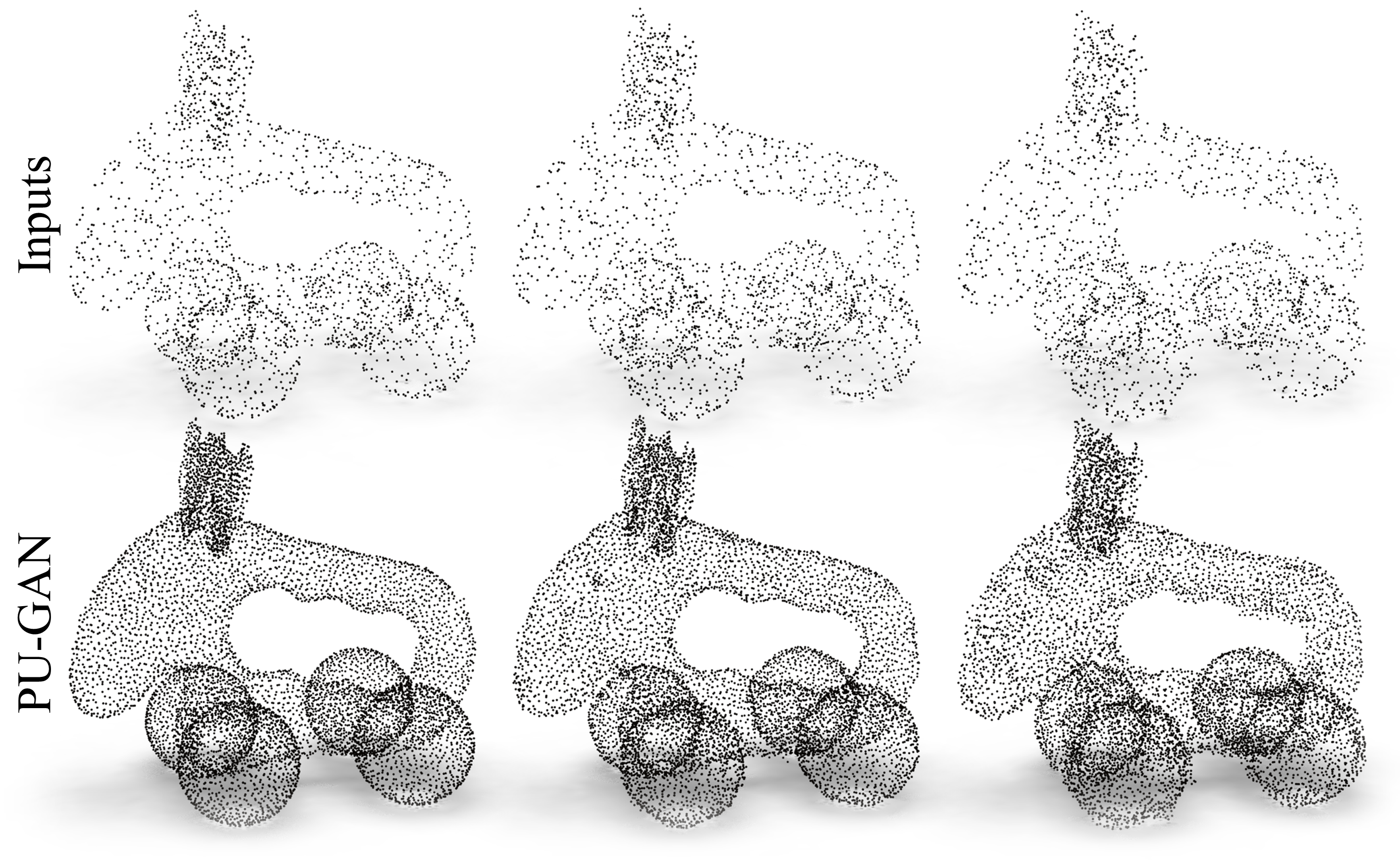
Upsampling point sets of varying noise levels |
|
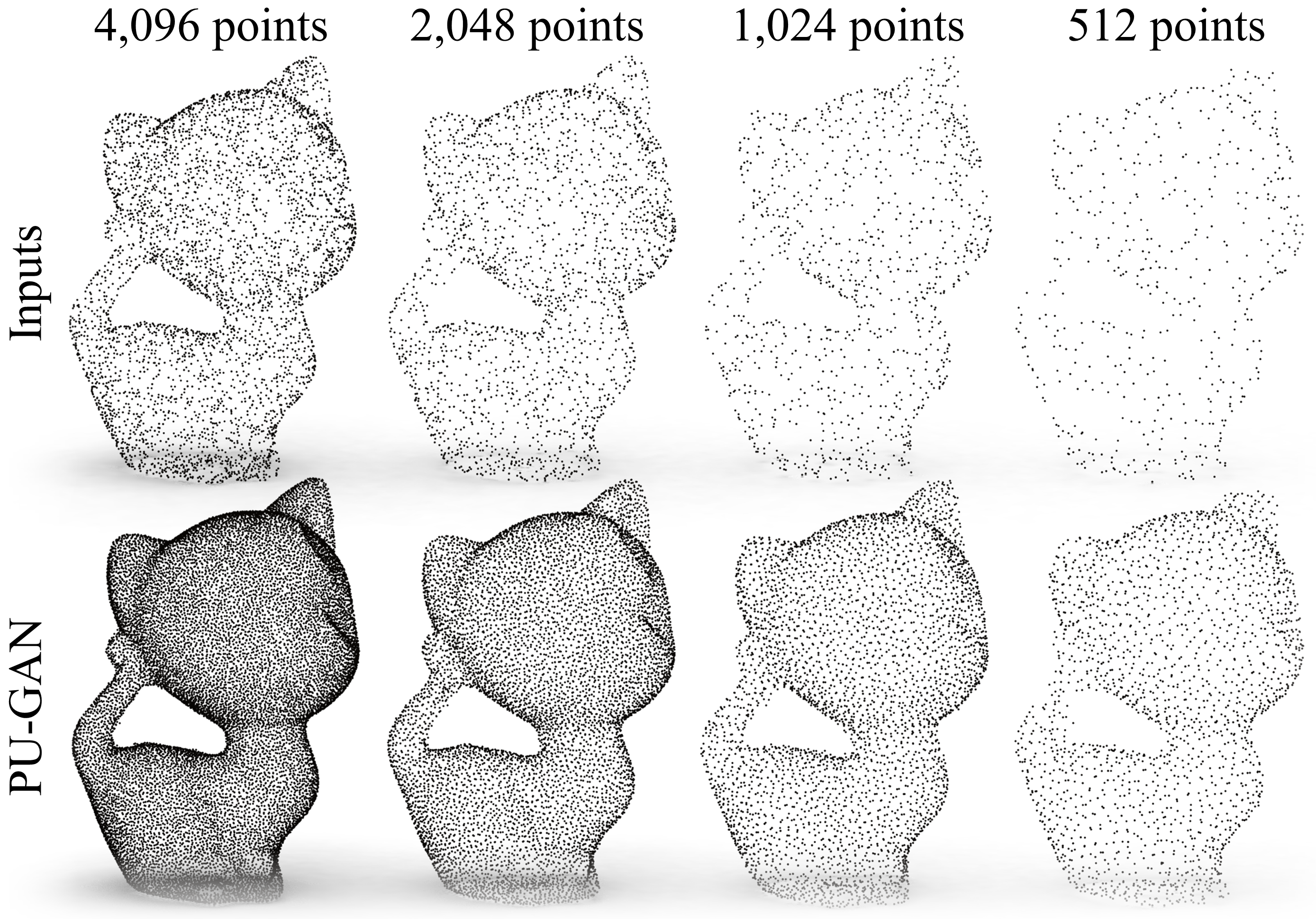
Upsampling point sets of varying sizes |
Citation
@inproceedings{li2019pugan, |
Acknowledgments |